四軸飛行器為什麼可以保持動態平衡呢?
其實動態平衡是複雜的演算過程,不斷計算,再調整角度,才完成大家眼中的動態平衡。
新唐 NuMaker Drone 採用NuMicro® M451微控制器為主控晶片,透過M451微控制器強大的運算能力,完美實現平衡姿態控制。飛行器的平衡機制是採用新唐獨家創新開發的姿態運算資料庫 (AHRS Library),資料庫內容完整,姿態運算並支持高達10軸的感測器運算,能取得飛行器當下的姿態動作,姿態更新率也高達 500Hz,高更新率使動作可即時反應,不會產生延遲。整體方案設計採用PID電子穩定控制系統,可直接有效地控制姿態平衡穩定,使飛行器隨時隨地皆能正確地做出各種行動。
| NuMaker Drone介紹 新唐NuMaker Drone套件包含了飛控主機板、搖控手柄、2.4G RF module、分電板外加 Nu-Link-Me 模擬燒錄器,本套件擁有完整姿態運算資料庫 (AHRS Library) ,讓玩家簡易上手,不須鑽研感測器姿態運算的數學問題,更容易專注於飛行控制以及飛行應用的開發。搭配機架、電變、馬達、螺旋槳及背載鋰電池即可自由飛行。 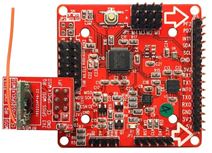  |
主辦單位:經濟部工業局智慧電子產業推動辦公室(SIPO)
協辦單位:財團法人資訊工業策進會、新唐科技股份有限公司
執行單位:如合跨界有限公司